




Main software for Pepper Robot. This Content Management System enables Pepper to connect to the cloud, provide account management, assign robots to skills, create and allocate menus, manage integrations and content.
![]() (Add Skills)
(Add Skills)


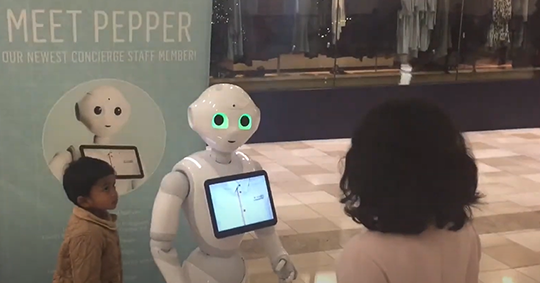
Pepper is joining the team at the luxury Mandarin Oriental, Las Vegas as “Technical Ambassador”
Pepper is joining the team at the luxury Mandarin Oriental, Las Vegas as “Technical Ambassador” providing answers to questions about the property, giving directions to area attractions and delighting guests with stories, dancing and selfies. The impressive, triple 5-star hotel will be featuring Pepper in its 23rd floor Sky Lobby, known for its dramatic views of the Las Vegas Strip.

Courtyard® by Marriott® Anaheim
Customers can be identified with their key card. Once logged in, they can order services (book a table at the restaurant, proceed to the checkout...) and get information about all the services proposed by the hotel.

Pepper the robot starts work at sushi restaurant
“Pepper’s roll-out is part of a larger vision to transform HSBC’s branch banking experience, we like to call it the ‘Branch of the Future,’ by providing a host of consumer-facing upgrades that will take the franchise in an exciting new direction.”
By asking initial questions, Pepper can help determine a customer’s needs, relay that information to bank staff and save time for everyone involved.

Dancing robot café opens in Tokyo
Pepper Parlor, based at the Tokyu Plaza Shibuya, offers an original menu designed by former New York chef Fumio Yonezawa, including sweet and savoury waffles made with five different types of dough. The café also houses a small shop selling food, accessories and apparel and – most notably – is staffed by robots.
10 Pepper robots work at the café, taking food and drink orders and interacting with customers, including taking photos with them..

Pepper Robot and HSBC® Bank
“Pepper’s roll-out is part of a larger vision to transform HSBC’s branch banking experience, we like to call it the ‘Branch of the Future,’ by providing a host of consumer-facing upgrades that will take the franchise in an exciting new direction.”
By asking initial questions, Pepper can help determine a customer’s needs, relay that information to bank staff and save time for everyone involved.

Mizuho Introduces SoftBank’s Pepper Robot to Tokyo Bank Branch
Mizuho Financial Group Inc. introduced SoftBank Group Corp.’s Pepper robot to its flagship branch in central Tokyo.
The 121-centimeter (48-inch) humanoid will entertain customers with games and multimedia and provide basic information on products. The bank plans to add its robot employee to five Tokyo branches by the end of the year.

Pepper Robot at Humber River Hospital Foundation
Meet Pepper, a humanoid robot that helps patients and their families throughout the hospital. Humber is the first hospital in Canada to use Pepper in a healthcare setting.
Humber currently has two Peppers on staff: one is used exclusively by the Child Life Program to help young patients feel at ease and a second to greet patients and their families in the Hospital’s main entrance.
While Pepper robots are used around the world in such industries as retail and hospitality, Humber River is the first hospital in Canada to use Pepper in a healthcare setting. Using dedicated applications built specifically for the Hospital, Pepper’s interactive touch-screen display helps visitors find specific departments, washrooms, exits and more. In addition to answering questions and sharing information, Pepper entertains, plays games and is always available for a selfie.

Pepper robot to work in Belgian hospitals
Pepper, the humanoid robot programmed to "understand" human emotions, is to take a new job - as a receptionist in two Belgian hospitals.
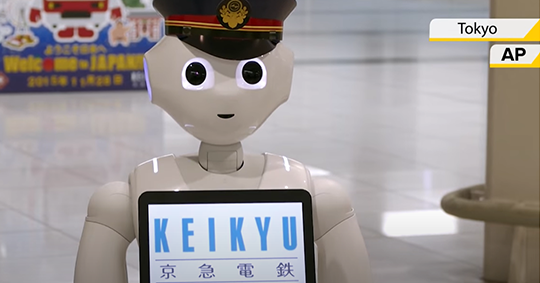
Pepper Robot Makes Debut Appearance at Tokyo Airport
Pepper debuts as a new member of staff for the Keikyu Line railway at Haneda International Terminal station in Tokyo, Japan. The robot is programmed to interact with Japanese and foreign commuters and to introduce Keiyu Line information.
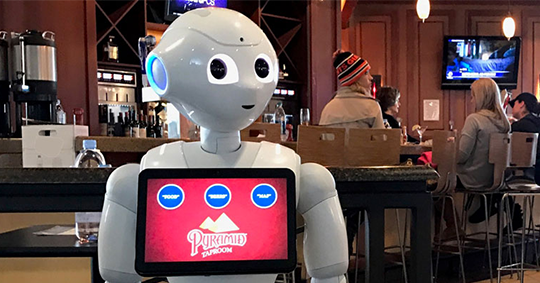
HMSHost brings humanoid robot to Oakland International Airport
Pepper the robot will greet guests at HMSHost’s Pyramid Ale Taproom in Terminal 2 and offer assistance and menu recommendations.
Using an interactive map displayed on Pepper’s screen, passengers will also be able to find directions to their gate, restrooms and other points of interest.
Jim Schmitz, Vice President of Innovation, HMSHost, said: “At HMSHost, we are always working to identify the next opportunity to elevate the guest experience at airports. Through constant innovation, we aim to engage with travelers and assist them on their journey. We are very excited to introduce them to Pepper as part of these efforts.”
Pepper Robot supporting DEWA
Supporting Dubai governative society’s DEWA (Dubai Electricity and Water Authority) in enhancing customer happiness through innovation.
Softec / YAS Digital Media aim at going beyond the standard customer journey, offering to prospects and customers a unique experience, simultaneously digital and physical. The strategic role is played by Pepper, the first humanoid robot: with his empathy and humanity, he is able to build a distinctive relation with the people around him and the surrounding space.
Placed as digical touchpoint into a number of stores, he is not just a digital service provider, but also puts people at their ease in order to increase the excellence of services, making Dubai the smartest and happiest city in the world.

Pepper, Interactive Digital Representative
Support E.C.S.S.R, the Emirates Centre for Strategic Studies and Research based in Abu Dhabi, to improve the visitor experience at the centre and collect prompt feedback from guests. This was the challenge accepted by Softec and Yas Digital Media, a joint venture of Fullsix Group located in the Middle East.
As an Interactive Digital Representative, through empathy and humanity, Pepper played a strategic role in building a distinctive relationship both with the audience and with the environment that surrounds it. After joining the organisation at the end of 2018, Pepper welcomes visitors, sends e-mails and collects feedbacks during the exhibitions and conferences held in Abu Dhabi and in nearby locations.
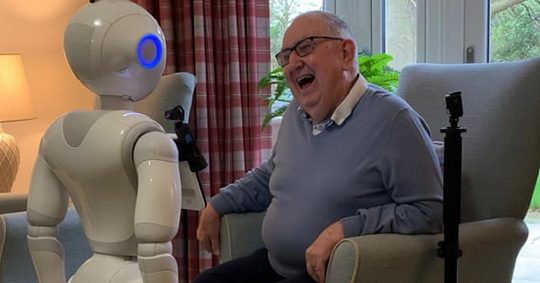
Robots to be used in UK care homes to help reduce loneliness
The trial, in the UK and Japan, found that older adults in care homes who interacted with the robots for up to 18 hours across two weeks had a significant improvement in their mental health
The wheeled robots, called “Pepper”, move independently and gesture with robotic arms and hands and are designed to be “culturally competent”, which means that after some initial programming they learn about the interests and backgrounds of care home residents. This allows them to initiate rudimentary conversations, play residents’ favourite music, teach them languages, and offer practical help including medicine reminders.

Pepper at Westfield Shopping Centers: Impact Story
Westfield Shopping Centers recently welcomed Pepper to their San Francisco and Silicon Valley locations. Pepper was on hand to help drive foot traffic and entertain shoppers. This innovative business technology is transforming Customer Experience at retail locations and shopping malls around the country.
Pepper the robot at Valleyfair Mall in Santa Clara
Pepper the robot at Valleyfair Mall in Santa Clara was on hand to help drive foot traffic and entertain shoppers. This innovative business technology is transforming Customer Experience at retail locations and shopping malls around the country.
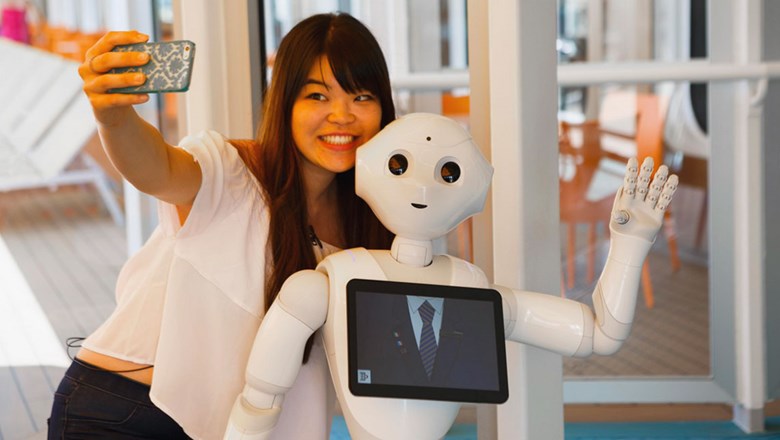
The Costa Diadema has welcomed aboard Pepper, a humanoid robot programmed to interact with the ship’s guests.
“Our goal is to amaze people who choose to spend their holidays with us, and to go beyond their expectations and offer something unforgettable,” said Neil Palomba, president of Costa Cruises.
The robots also inform guests about the ship and its services, including restaurants and excursions. And, Pepper offers guidance about port calls on the ship’s Mediterranean itinerary.
Costa Cruises is bringing five of the latest generation of Pepper robots on board the flagship of the fleet, to entertain guests during their vacations.